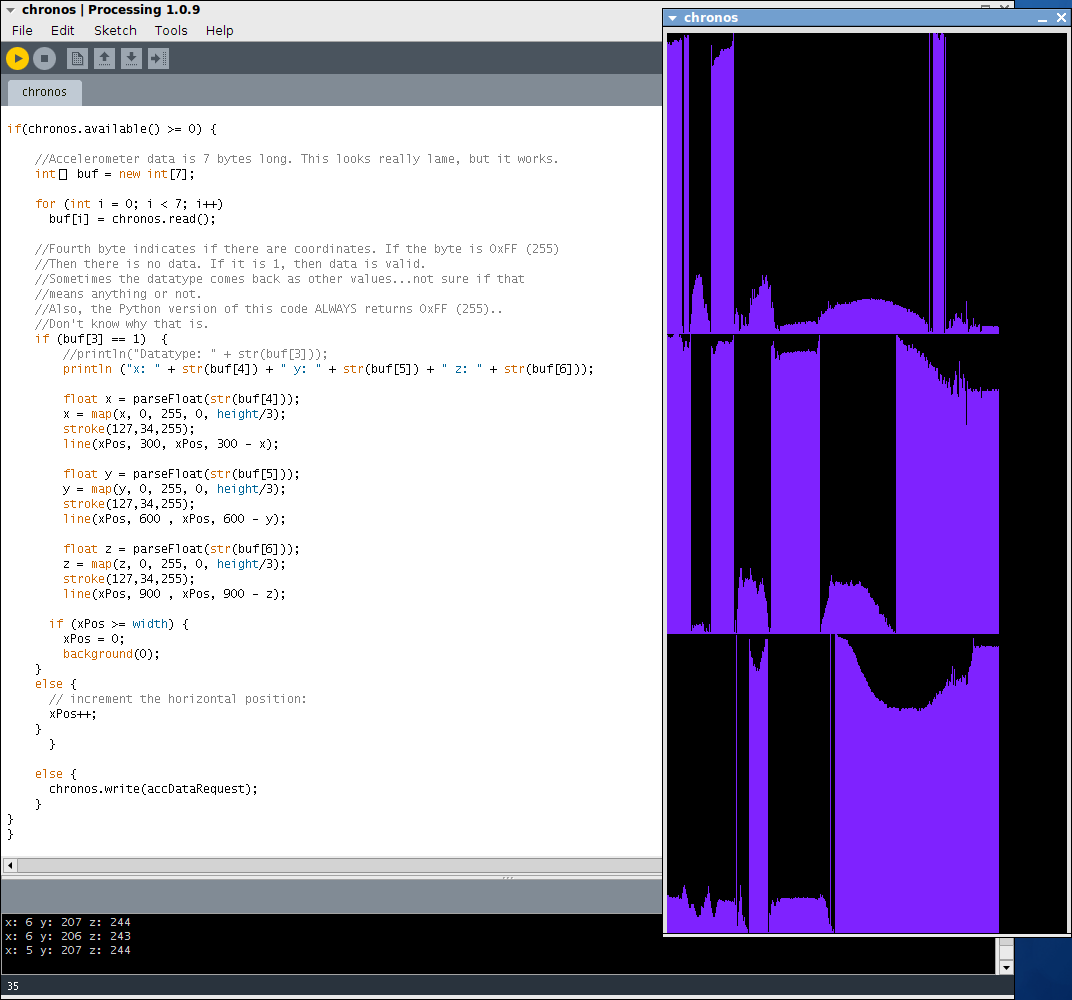
He estado intentando durante un tiempo incómodo para averiguar cómo interpretar los datos del acelerómetro inalámbrico de TI Chronos . Desde mi computadora portátil con la radio usb incluida, la leí en python básicamente siguiendo esta recepción, luego la lanzo en una aplicación pyglet para mostrar El vector de aceleración 3D. Se lee como caracteres sin firmar, pero no puedo entender los datos. Tampoco lo he encontrado documentado en ninguna parte. Aquí hay un ejemplo de impresión de mantener el reloj quieto, mientras lo gira entre 1 eje sin problemas.
[253 245 24 255 6 7 1]
[ 0 241 20 255 6 7 255]
[255 229 28 255 6 7 255]
[255 229 25 255 6 7 255]
[ 1 229 19 255 6 7 255]
[249 224 21 255 6 7 255]
[254 219 17 255 6 7 255]
[255 218 11 255 6 7 1]
[247 211 15 255 6 7 255]
[251 209 10 255 6 7 255]
[251 212 255 255 6 7 255]
[243 194 16 255 6 7 255]
[243 200 7 255 6 7 255]
[247 197 3 255 6 7 1]
[246 190 10 255 6 7 255]
Obviamente, los primeros 3 bytes son los datos del acelerómetro, y también claramente los números deben estar firmados de alguna manera. Pero, ¿por qué los vectores de fuerza no son suaves? Es más obvio en la visualización de opengl, pero incluso en el pequeño conjunto de datos anterior, se puede observar, por ejemplo, saltar de 255 a 1 en ningún momento. Finalmente, quiero obtener Gs reales de los datos, pero por ahora me conformaré con obtener un vector de fuerza suave que parezca algo coherente con la rotación del reloj. Puntos de bonificación si alguien sabe lo que significan los últimos 4 bytes. Esperemos que esta sea una pregunta de tipo chiphacker.