He comprado un Robot Romo de Romotive. Desafortunadamente, tengo algunos problemas técnicos (no funciona, en absoluto), así que decidí explorar un poco el PCB y ver de qué está hecho.
Comprendo la mayoría de los PCB y rastreé los pinouts de la mayoría de los Atmel Chip, pero nunca antes había tenido experiencia con motores. Ellos usaron este motor.

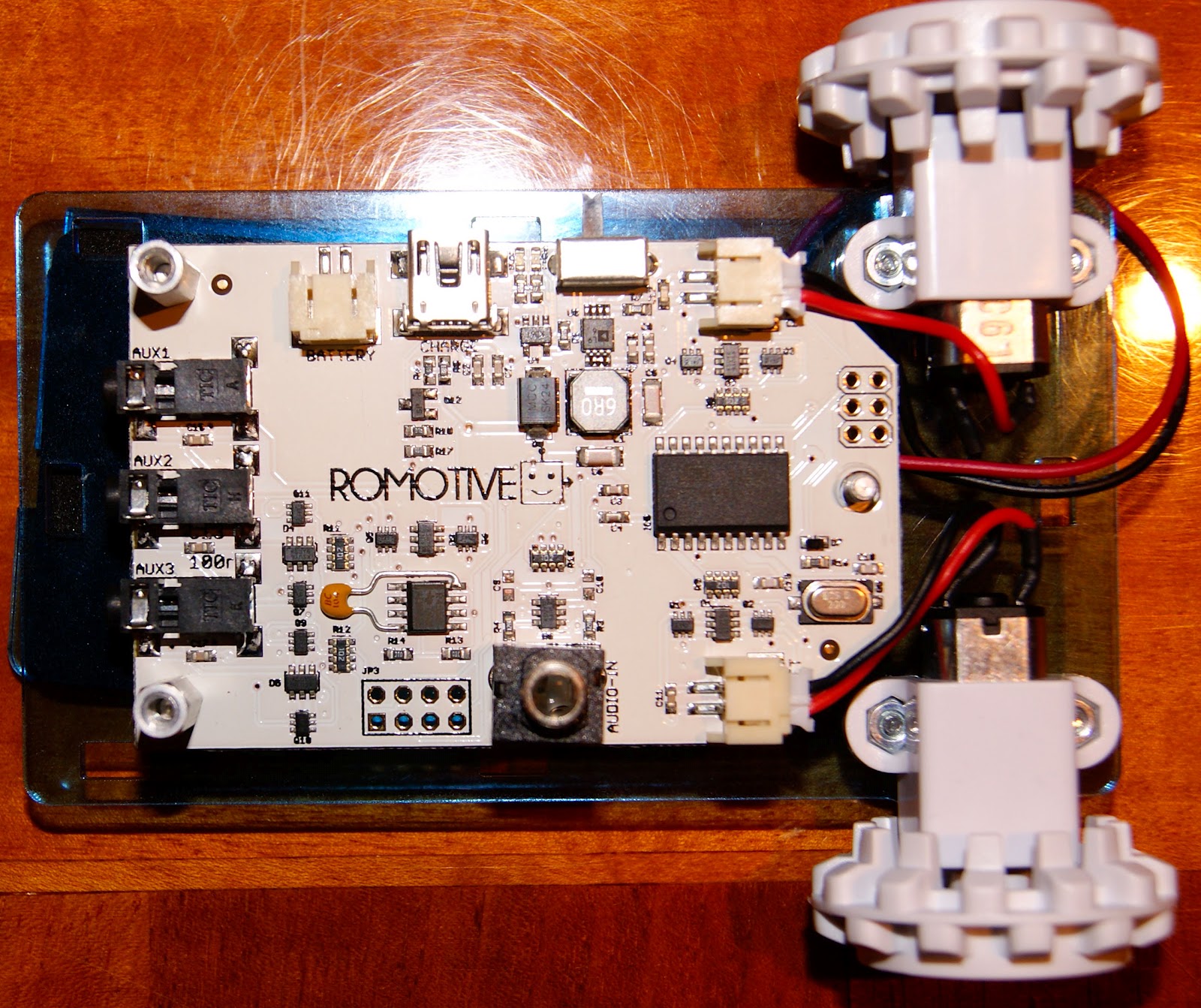
Haga clic aquí para obtener un primer plano de 300 mm @ 8mp 'telescopio Hubble' de el PCB expuesto a 15 segundos, 100ISO 24f (5.5mb)
Cuando enciendo el bot, hay 3.2 V en los motores [probado el motor - & + a GND)] pero probando el motor + & - Y viceversa produce 0Volts. Así que teniendo en cuenta el H-Brdige ahora eso parece normal.
Emitiendo cualquier comando, los motores no giran ... (cuando conecto un motor directamente a la batería, gira felizmente con un buen par de torsión ...) Cuando emito comandos, el voltaje es el mismo en todos los motores (al parecer, las señales no son lo suficientemente altas o posiblemente el protocolo ha cambiado) mientras está conectado a la PCB. Pero no puedo determinar si la MCU responde a cualquier comando.
¿Debo asumir que está controlado por PWM de alguna manera? ¿Estoy en lo correcto? Probablemente no. tampoco puedo rastrear a qué pines están conectados los motores en el Atmel. Después de tomarme una hora para obtener la foto macro perfecta, logré descifrar algunas de las pistas en los nombres de los IC.
- El motor derecho está conectado a los pines 3,4
- El motor izquierdo no está en la imagen para los pines 1,2
- A en la imagen indica que las pistas están conectadas
- ? en la imagen indicada no tengo idea de a dónde va esta pista ... el lado izquierdo no tiene esto
- Negro "-" en la imagen indica GND

- D2comosesimbolizadebeserdiodos.(KSU)(Y6)[Estosvaloresseimprimendosveces,conelladoderechohaciaarribayhaciaabajo,¿indicaundiodocombinado?]Creoqueesun
0.3Wzener18V±5% - Q4,Q3indicatransistoresperolainvestigaciónmellevaadiodosdobles1N4148.
- R6indicaunaresistenciaconunvalorde102,porloquees10k
- ¿Podríaestaconfiguracióncompletaserel
ATT: JustJeff
Esto es lo que parece ser un diseño un poco más claro de las pistas y puedes notar las pistas gruesas utilizadas para los pines del motor y las pistas delgadas para las señales. Así que, como sugirió, tiene que haber una fuente de alimentación para esta corriente en algún lugar ... Estoy mirando esta foto y realmente no puedo averiguar de dónde. Obiosly se debe cambiar utilizando los transistores emparejados que @RussellMcMahon identificó (q1, q2) y los diodos / zenners (supongo).

Romotive
Romotiveesunproyectodecódigoabierto.Pero...
Incómodamente,nohayuncódigofuentedisponibleparaAtmel,soloSDK.Mirobotestámuerto.consinrespuestaalgunarespuestadelequipodeRomo(séquedebenestarextremadamenteocupadosporquemuchasotraspersonastampocofuncionan).Asíquetambiénpodríahacermipropiofirmwaresisupieracómoconducirlosmotores¿OalmenosprobarlosconmiArduino?Oalgo..
Vínculo románico de You-Tube pirateado
-



{kind=link}