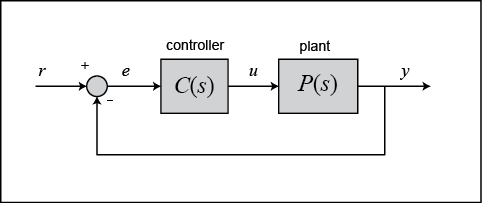
De acuerdo con el siguiente sistema de control PID simple:
{kind=link}
Podríamos crear la ecuación:
$$ (R (s) -Y (s)) C (s) P (s) = Y (s) $$
Lo que nos llevará a
$$ \ frac {Y} {R} = \ frac {CP} {1 + CP} $$
Entonces, si queremos minimizar el error (que es \ $ RY \ $), entonces tiene sentido pensar que idealmente queremos hacer \ $ Y = R \ $ (lo que significa que la salida está siguiendo la entrada en mejor). Aunque, esto nos llevaría a:
$$ \ frac {Y} {R} = 1 = \ frac {CP} {1 + CP} $$ $$ 1 + CP = CP $$ $$ 1 = 0 $$
Lo que obviamente es incorrecto. Creo que no me faltó nada estúpido en los pasos matemáticos. Entonces, ¿qué significa esta contradicción en el contexto de control? ¿Y por qué apareció esto en las ecuaciones?