Los requisitos
Quiero controlar los ventiladores PWM para mantener algunas unidades de disco duro en un servidor a aproximadamente 35 ° C, el valor absoluto no es crítico, sin embargo, quiero que la temperatura sea estable independientemente de la temperatura ambiente (dentro de límites razonables, por supuesto, si la temperatura ambiente es de 40 ° C, obviamente no puede funcionar).
Ya diseñé un controlador basado en un LM35 (que se adjuntará al caso de una de las unidades) pero solo fue proporcional. Luego lo modifiqué para agregar un término integral para evitar cualquier error de estado estable (principalmente debido a los cambios de temperatura ambientales).
El circuito
Puede encontrar el diagrama del circuito aquí .
{kind=link}
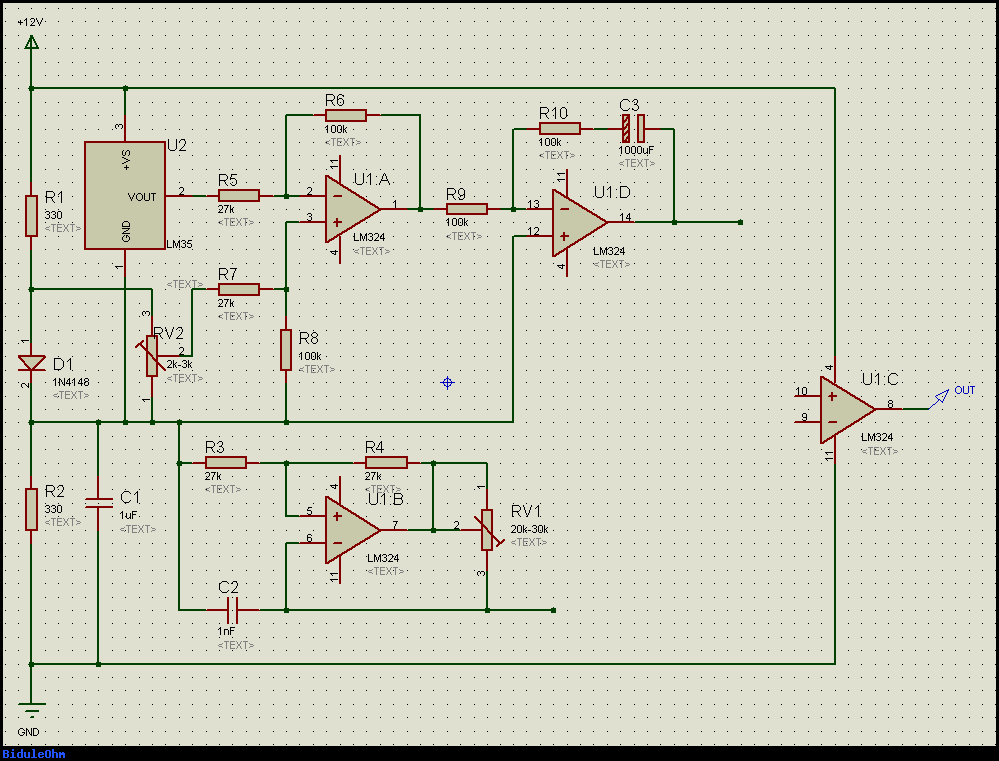
U1: A es el amplificador de error
U1: B es el generador de ondas triangulares (sé que no generará una señal de triángulo perfecta, está bien para mí)
U1: C es el comparador final que genera la señal PWM (no está conectada porque no importa por ahora)
U1: D es el filtro PI
Los problemas
1) No sé cómo elegir los valores para R9, R10 y C3 (son solo marcadores de posición por ahora) porque todo lo que puedo encontrar en los controladores PI (D) es para los controladores de software (y, no, No quiero usar un arduino o cualquier otro MCU).
2) No sé cómo puedo controlar los parámetros Kp y Ki de forma independiente y cuáles deberían ser sus valores para esta aplicación.
3) No estoy seguro de la disposición de los componentes en torno a U1: D.
NB: Las unidades tienen una inercia térmica enorme, por lo que creo que el bucle probablemente será muy estable sin demasiada afinación, pero si alguien puede confirmar que sería genial. Minimizar el tiempo de establecimiento del sistema no es una preocupación en absoluto aquí.
Gracias a cualquiera que pueda ayudar :)